はじめに
米・カリフォルニア大学バークレー校の研究チームが、ロボットがオブジェクトを把握して動かす速度とスキルを提供する新しいAIモデルを作成しました。これにより、倉庫などですぐにロボットを支援に導入することが可能になるとしています。
Deep learning helps robots grasp and move objects with ease
https://news.berkeley.edu/2020/11/18/deep-learning-helps-robots-grasp-and-move-objects-with-ease/
論文
Deep learning can accelerate grasp-optimized motion planning
https://robotics.sciencemag.org/content/5/48/eabd7710
概要
現在、コロナウィルスの影響でオンラインショッピングの需要が高まり、そのため倉庫業務が急速に増えています。ロボットを導入することは解決策の一つとして有望視されていますが、従業員の安全性の観点から迅速な導入には簡単なことではありませんでした。
今回、カリフォルニア大学バークレー校の研究チームが提供するAIは、ロボットにオブジェクトを判別しスムーズに動かす速度とスキルを提供することができるとしています。
〇現在の問題点
さまざまな種類のオブジェクトをどこでどのように拾うかを決定し、各オブジェクトをある場所から別の場所に移動するために必要な動きの調整など、人間なら自然に行うことができる動作も、ロボットには困難という問題がありました。場合によっては、製品とロボットの両方に損傷を与えるリスクがあるため、倉庫業務の自動化は進んでいません。そのため、実際に多くの倉庫が人間によって運営されてきました。
倉庫業務の自動化における問題点は、自動車の製造ラインなどと異なり、動きが一定ではなく、発注ごとに多様な動きを求められるということにあります。研究チームによる以前の研究では、ロボットがオブジェクトを拾う方法と、オブジェクトをある場所から別の場所に移動する方法の両方を計算できる「Grasp-Optimized Motion Planner」が作成されました。
ただし、このプランナーによって生成されたモーションはなめらかではなく、ソフトウェアのパラメーターを微調整してより滑らかな動きを生成することもできましたが、これらの計算の計算には平均で約30分かかるという問題がありました。

〇論文の手法
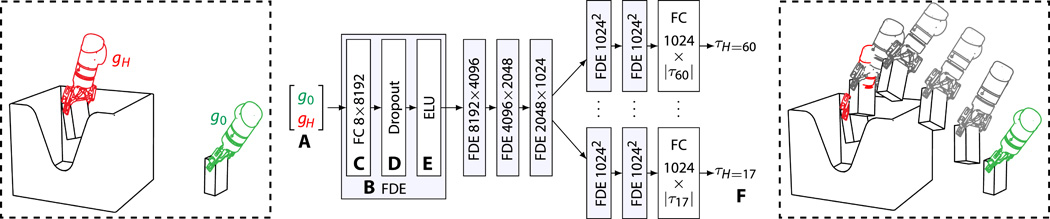
今回の手法では、ディープニューラルネットワークを統合することでプランナーの計算時間を劇的にスピードアップしました。
まずニューラルネットワークにより、ロボットは例から学ぶことができ、同様のオブジェクトやモーションに一般化することが可能になります。この計算には数ミリ秒しかかかりませんが、不正確であるという問題があります。その後、ニューラルネットワークによって生成された近似を、モーションプランナーで最適化することで、精度を高めることができます。このことで、同様の精度をだすことに必要な計算時間を10分の1未満に短縮することに成功したとしています。