はじめに
新しいテクノロジーの導入により、野生動物の研究でもビッグデータの取得及び処理がひとつの問題となっています。今回、大阪大学の研究チームが野生動物の隠れた生態をAIで観測する手法を発表しました。研究について、論文をもとにご紹介します。
概要
大阪大学を中心とした共同研究グループが、人工知能を搭載したバイオロギングデバイスを開発し、新たに六種類の動物の生態を発見しました。例えば、野生の海鳥の採餌行動を自動的に検出・撮影することに世界で初めて撮影に成功しました。
これまで小型動物に搭載するデバイスは基本的に連続撮影でしたが、バッテリ重量の制約があり限られた時間しか撮影することができませんでした。そのため生態学者が興味ある行動でも、回数が少ない行動は撮影することが困難でした。今回の研究では人工知能を搭載した小型のバイオロギングデバイスを開発することで、従来では観測が難しかった行動回数の少ない貴重な行動を撮影することに成功しました。
今後は伝染病を媒介する野生動物と人間の接触解明や、人間が立ち入れない極限環境でのAI実装への応用に期待がかかっています。
今回使われたAIについては、以下で詳しくご紹介します。なお、利用している図は下記論文より引用しております。
Deep learning-assisted comparative analysis of animal trajectories with DeepHL
https://www.nature.com/articles/s41467-020-19105-0
大阪大学公式HP上の紹介記事
https://resou.osaka-u.ac.jp/ja/research/2020/20201030_1
手法の紹介動画
https://www.youtube.com/watch?v=y-UEgDxchxA
利用モデル詳細
研究の背景・手法・目的
動物の行動の比較分析は、グループ固有の行動を解明するために広く使用されてきました。近年では、GPSなどの新たな技術の導入によってさらに大規模かつ詳細な情報を手に入れることが可能になりました。しかし、GPSなどの新しいセンシングテクノロジーによって生成されたビッグデータでは、グループの違いを手動で対比することが困難になるという問題があります。今回の研究では、動物の動きのデータ、つまり軌道を比較分析するための深層学習支援プラットフォームであるDeepHLが開発されました。
DeepHLは、Attentionメカニズムに基づくディープニューラルネットワークを使用して、1つのグループから特徴的な軌跡を自動的に検出します。次に、視覚化された軌跡に対してこれらのセグメントを強調表示し、生物学者がこれらのセグメントに集中できるようにすることで、強調表示されたセグメントの根本的な意味を明らかにして、新しい仮説の策定を容易にします。
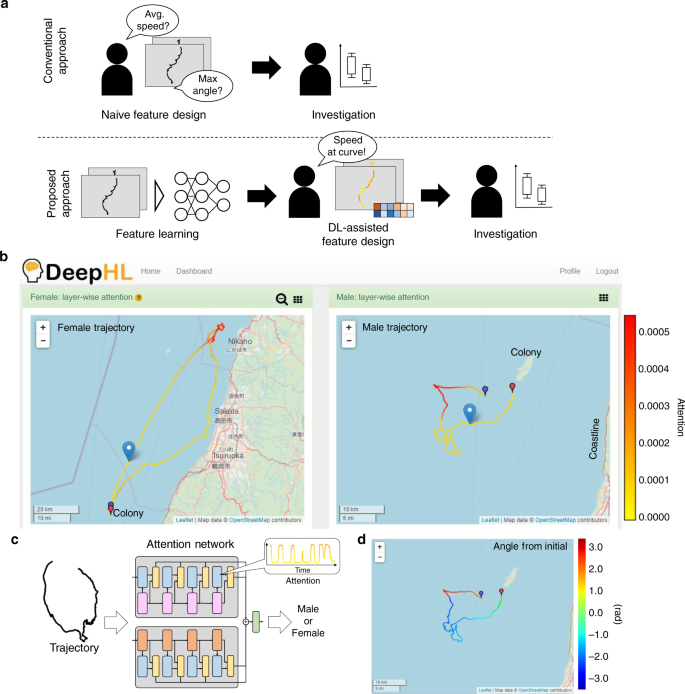
a:従来手法と今回のDLモデル手法の違い。
b:性別毎のオオミズナギドリの軌跡を比較したDeepHLWebインターフェイスのスクリーンショット。軌跡のいくつかの特徴的なセグメントは赤で強調表示されている。これらは、オスとメスの鳥の軌跡を区別するように訓練されたニューラルネットワークモデルによって検出されました。
c :DeepHLは、時系列のAtteintionスコアを使用して軌跡を分類するときに、ニューラルネットワークが注意を向ける入力軌跡内のセグメントを抽出します。
d : 強調表示されたセグメントの意味をより深く理解するために、DeepHLは、注意値と高度に相関する他のセンサーデータまたは手作りの特徴の値で軌跡を色付けします。
モデル詳細
DeepHLでは、最初に2つのクラスからの軌道データで提案されたネットワーク(DeepHL-Netと呼称)を学習します。(ii)次に、DeepHL-NetのAttentionメカニズムは、DeepHL-Netの各レイヤーの各軌跡における各データポイントのAttentionスコアを計算します。(iii)Attentionスコアが計算されると、2つのクラスの違いをキャプチャすると想定される特定のレイヤーからのアテンション出力を使用して、DeepHLによって軌道の一部が強調表示されます。
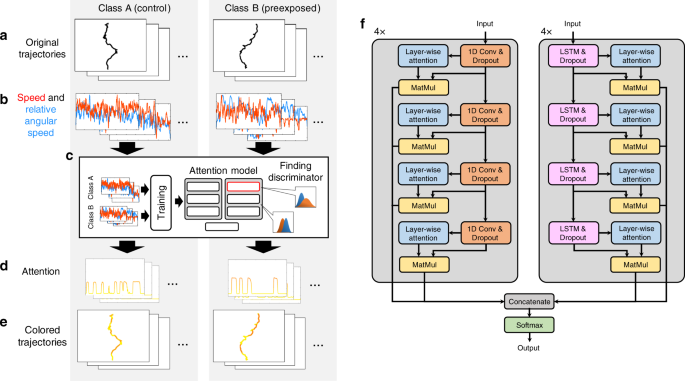
a:軌跡
b: 2次元座標の時系列は、速度と相対角速度の時系列に変換され、位置と回転に不変の分析を実現します。
c: DeepHL-Netは時系列でトレーニングされ、そのAttentionスコアを使用して識別層が検出されます。
d:軌跡がトレーニング済みのDeepHL-Netに入力されると、ディスクリミネーターレイヤーは時系列の注意値を出力します。時系列の長さは、速度と相対角速度の時系列の長さと同じです。
e:各軌道は、レイヤーによって取得された対応する注意値で色付けされます。私たちのシステムでは、図1 bに示すように、大きな注意値は赤でエンコードされ、小さな注意値は黄色でエンコードされ ます。
f:マルチスケールの層ごとのAtteintionモデル(DeepHL-Net)。このモデルの入力と出力は、それぞれ時系列のプリミティブ特徴量と予測クラスになります。モデルは、畳み込み層用の4つのスタックとLSTM層用の4つのスタックで構成され、さまざまなレベルのスケールで特徴を抽出します。
※「1D Conv and Dropout」および「LSTM and Dropout」というラベルの付いたブロックは、それぞれ1D畳み込み層とドロップアウトのある長短期記憶(LSTM)層を示します。「Layer wise attention」ブロックは、畳み込み/ LSTMレイヤーの出力のアテンションを計算します。「MatMul」ブロックは、注意とレイヤーの出力を乗算して、分類結果で高レベルの注意を払ったセグメントを反映します。「Softmax」ブロックは、出力ソフトマックス層を示します。