Neural Circuit Policies Enabling Auditable Autonomy
概要
ウィーン工科大学( 墺)、オーストリア工科大学( 墺)、マサチューセッツ工科大学(米国)の国際研究チームが、蟯虫などの小動物の脳に基づいた新しい人工知能システム「Neural Circuit Policies Enabling Auditable Autonomy」を開発しました。
この新しいモデルは、わずか数個のニューロンで車両を制御できるほどの性能を発揮しています。また解釈可能性が高いことと、ロバストなつくり(ノイズの多い入力にうまく対応することができる)という点が評価されています。
モデルが小さいため学習時間が短いことと比較的単純なシステムであるため、汎用的な実装を可能にすることが想定されています。
詳細
●アイディア
ウィーン工科大学( 墺)、オーストリア工科大学( 墺)、マサチューセッツ工科大学(米国)の国際研究チームが、蟯虫などの小動物の脳に基づいた新しい人工知能システムを開発しました。
今回の研究は自然界を観察することによってもたらされたものです。ウィーン工科大学の研究グループ「サイバーフィジカルシステム」の責任者であるラドゥグロス教授は「私たちは何年もの間、深層学習を改善するために自然から何を学ぶことができるかを調査してきました。たとえば、線虫などは、驚くほど少数のニューロンで生活していますが、それでも興味深い行動パターンを示しています。これは、線虫の神経系が情報を処理する効率的で調和のとれた方法によるものです。」と述べています。
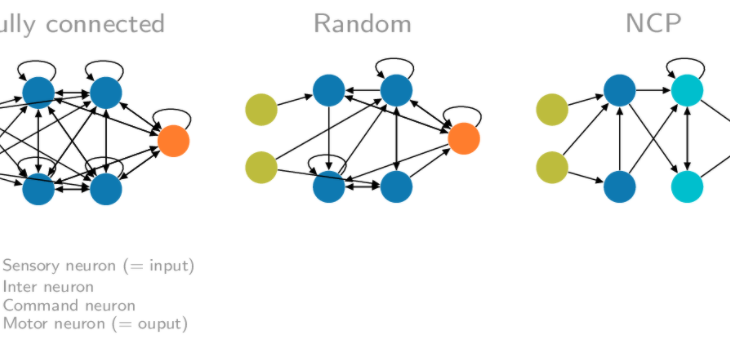
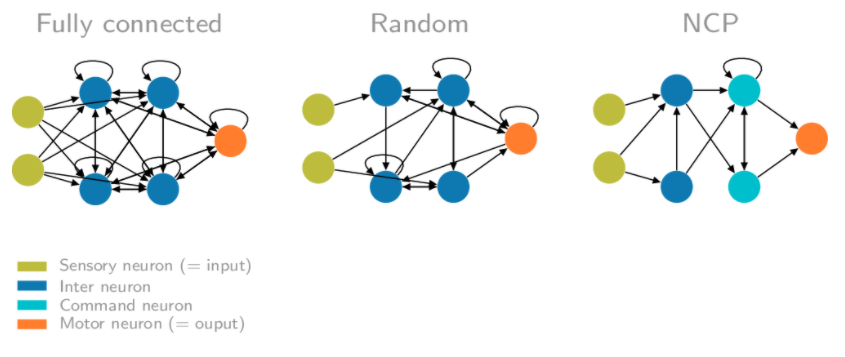
新しいモデルでは、個々のセル内の信号の処理が以前の深層学習モデルとは異なる数学的原理に従っています。また、構成されたネットワークは非常にまばら(すべてのセルが他のすべてのセルに接続されているわけではないことを意味する)で、そのおかげでネットワークが簡単になっているとしています。
●テスト
研究チームは、自動運転車が車線にとどまるためのニューラルネットワークを提案したモデルで作成し、実際に試運転することでその性能をテストしました。モデルは、入力として道路のカメラ画像を受け取り、右や左といった操縦を行っていきます。使用したモデルの特徴に、何を重視しているのか説明力があることも研究チームは主張しており、今回はカメラ画像の非常に特定の部分、カーブサイドとホライズンに焦点を当てていることがわかったとしています。また、各セルが何の役割をしているのかを特定することもできたとしています。このことは現在の一般的な深層学習モデルでは大変難しいため、興味深い点のひとつといえるとおもいます。
従来では数百万のパラメータで構成されるモデルで行われていたタスクですが、新しいモデルでは75,000のパラメータのみで実行可能になったとしています。
●モデル構成
モデルは、画像を処理する部分(CNNで構成され、画像情報の重要度を判断する)と、受け取った情報から車両を制御する二つの部分で構成されています。両者は接続されて、同時に学習されます。
パーセプトロンモジュールからの情報をステアリングコマンドに変換するコントロール部分のシステム(論文では、NCP:neural circuit policy)は、わずか19のニューロンから構成されています。これは従来の最先端モデルよりも最大で3桁分もニューロンの数が減少しているとしています。
●実装について
コードがgithub上で公開されており、Kerasベースで構成されており比較的簡単に実装することができます。興味がある方は、下記URLからアクセスしてお試しください。
https://github.com/mlech26l/keras-ncp
論文紹介動画
https://youtu.be/8KBOf7NJh4Y
論文掲載誌(Nature)
https://www.nature.com/articles/s42256-020-00237-3
参考記事URL
https://www.sciencedaily.com/releases/2020/10/201013124054.htm
Mathias Lechner, Ramin Hasani, Alexander Amini, Thomas A. Henzinger, Daniela Rus, Radu Grosu. Neural circuit policies enabling auditable autonomy. Nature Machine Intelligence, 2020; 2 (10): 642 DOI: 10.1038/s42256-020-00237-3